VP16L Surface All-Attitude Salvage Robot
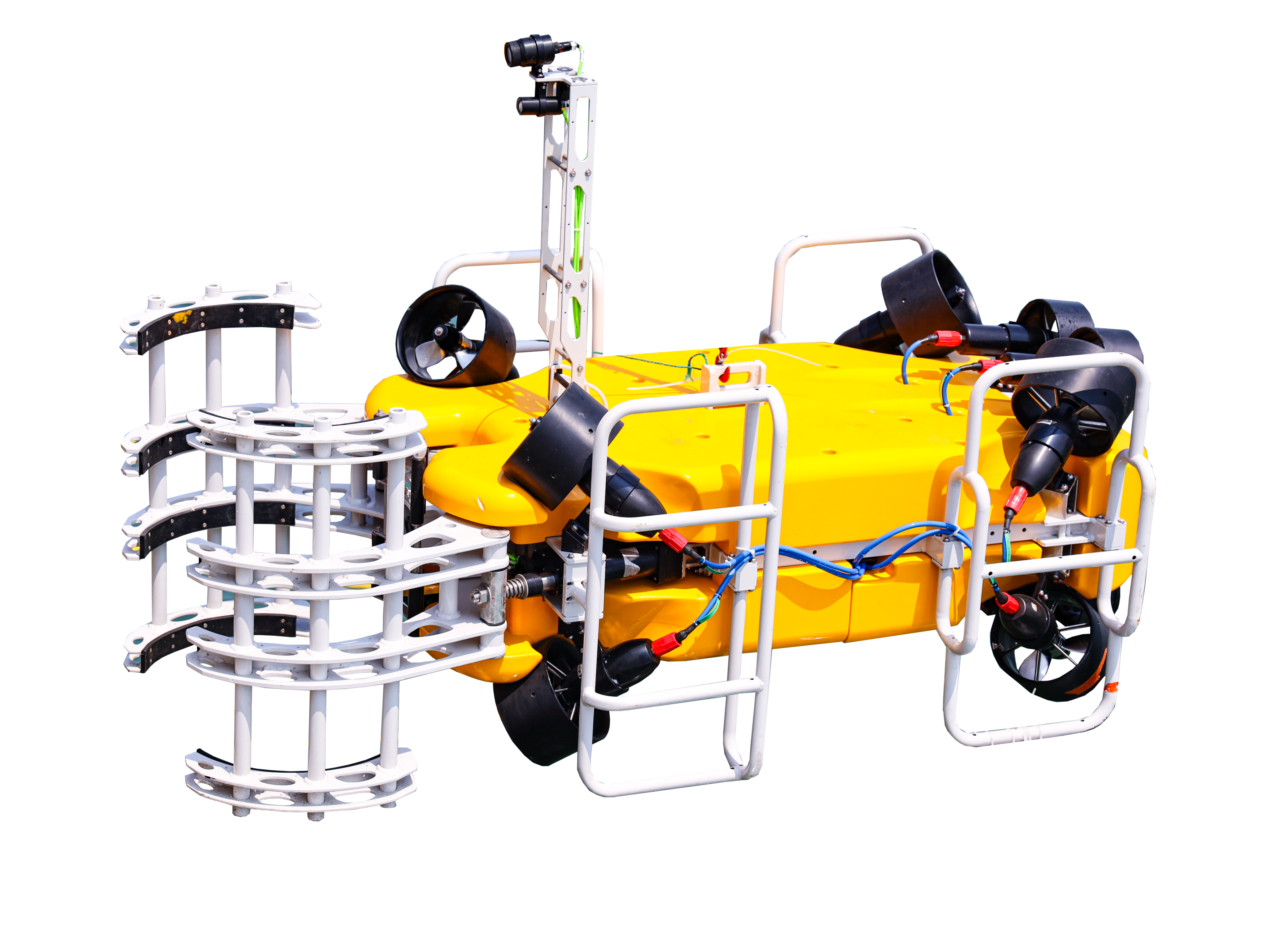
The VP16L Surface All-Attitude Salvage Robot is a high-performance robot designed for salvaging floating objects in water. The system consists of the robot body, winch, power distribution system, and a three-screen control box, featuring a flexible structure and powerful current resistance. Its maximum working depth is 100 meters, with a length of 2.5 meters and a weight of 400 kg, enabling it to perform salvage tasks quickly and efficiently. The all-attitude control technology allows the robot to operate at various angles and directions, ensuring stability and precision in complex environments.
The core features of the robot include object retrieval by claws, all-attitude control, and strong current resistance, which enable it to handle salvage tasks of various surface targets. Whether it’s retrieving floating objects or performing stable operations in complex water flow environments, the robot can accomplish tasks efficiently. The all-attitude control function ensures the robot can operate in any water environment with flexibility and adaptability. Additionally, the robot is equipped with 12 thrusters, enhancing its maneuverability and stability during surface and underwater operations.
This surface salvage robot excels in various application scenarios, particularly in tasks like surface object salvage, water rescue assistance, and offshore operational support. Its powerful salvage capability and all-attitude control system not only enable it to carry out floating debris clearing tasks but also play a crucial role in rescue missions, improving operational efficiency and ensuring the safety of the workers.
- Maximum Grasping Object Diameter600 mm
- Equipped with 12 thrusters
- All Attitude Control
- Dimensions2500 × 1200 × 900 mm
- Weight400 kg
- Working Depth100 m
- Customizable